
kharma's paper (2)
Adaptable image segmentation via simple pixel classification
Introduction
Their image segmentation method combines 3 features: 1. Do not need to employ complex features(like color, texture, edge or other spaces) to return a better segmentation accuracies. 2. It uses a simple yet flexible multiscale spproach to local pixel heighborhood delineation, which is inspired by the concept of foveation. So it leads to a linear rather than a quadratic increase in the 3. It is a readily parallelizable segmentation algorithm
Method
Training phase
Input GT images(include hue, saturation, value and intensity or HSVI format) to train.
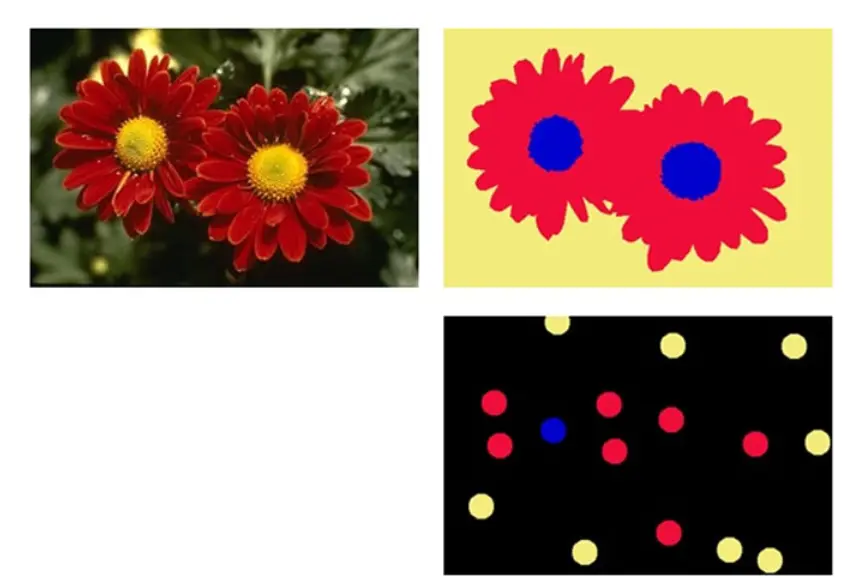 A set of training images.The upper right quarter
and the lower right quarter of this Figure contain the full GT and
partial GT images corresponding to the OI in the upper left quarter
column.
A set of training images.The upper right quarter
and the lower right quarter of this Figure contain the full GT and
partial GT images corresponding to the OI in the upper left quarter
column.
This method limite the number of classes in cureent implementation to 64, including a no-class class.
Then construct a special data structure, called N-tree. N-tree is made of N plains of "pixels". A pxel(\(P_{i,j,m-1}\))at position(i,j) within a given layer(m), excecpt for layer 0( which is given),is a selectabel function(f)(eg, Gaussian blur) of a resizabel square neighborhood(\(N_{l,s}\)) with odd-valued length \(l\) and shift \(s\) of the equivalent pixel in the preceding level (m-1)
\[P_{i,j,m}=f(N_{l,s}(P_{i,j,m-1}))\]
look at the example below. \(l=3\)
and \(s=3\). Each pixel in the
neighborhood N at level 1 results from the application of function \(f\) to the underlying 3*3 neighborhood of
pixels at level0. At level 2, a pixel comes from function f as applied
to 9 pixels from level 1. However, these 9 pixels are not adjacent but
are shifted apart by 3 pixels, in both dimensions. At level 3, a pixel
results from the application of function f to 9 pixels also, but these
pixels are now separated by \(3^2\)
pixels. Generally, shift \(s\) between
pixels in the square neighborhood of a central pixel at level m is equal
to \(l^{m-1}\). 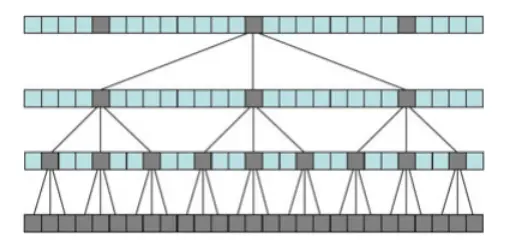
This Figure show a 2-dimensional slice of a 3*3 N-tree built using a shift value of 3, with levels 0,1,2 and 3 is showm. The lowermost layer is level 0, which is the original image
The whole process of preparing of Image can be seen from the image.
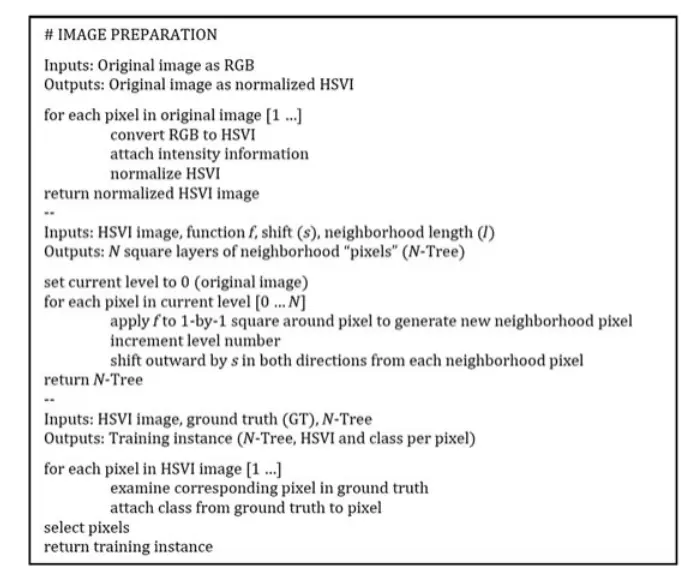
And the flow chart we can see below: 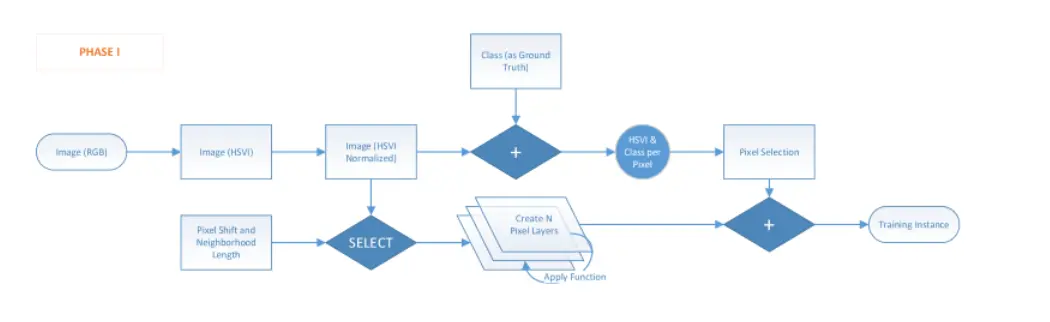 Phase1 shows how to prepare the training instance.
Phase1 shows how to prepare the training instance.
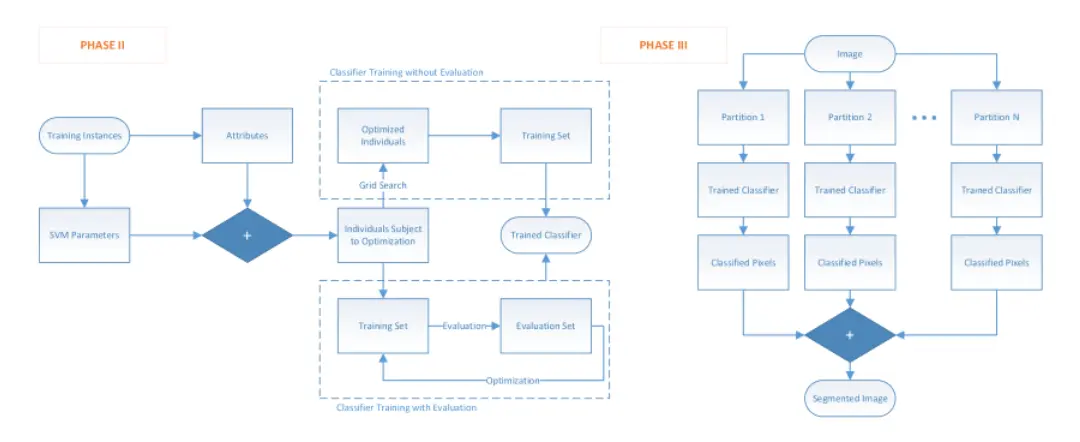 Phase2 shows how to training classifer and Phase3
shows how to segmented images.
Phase2 shows how to training classifer and Phase3
shows how to segmented images.
Experimental setup
Test measures
This research uses the flowing formula to represent the effect of each methods. The measure algorithm we can see below. \[TP\%=\frac{TP count}{TP count+FN count}*100\]
TP means true positive, FP means false positive, TN means negative
and FN means false negative. 
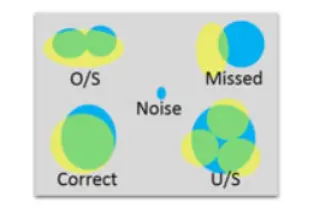 This figure shows 5 different results which will be
return by the classifier. Yellow regions are regions from the GT image,
while blue regions come from the machine-segmented(MS)image, and gray is
the background. O/S is an oversegmented region(means segmented region is
larger than the actural area); U/S is an undersegmented region(means
segmented region is lower than the actural area); correct is a correctly
segmented region, while a missed region is not correctly segmented or
O/S or U/S; Noise is an MS region with no ground truth equivalent.
This figure shows 5 different results which will be
return by the classifier. Yellow regions are regions from the GT image,
while blue regions come from the machine-segmented(MS)image, and gray is
the background. O/S is an oversegmented region(means segmented region is
larger than the actural area); U/S is an undersegmented region(means
segmented region is lower than the actural area); correct is a correctly
segmented region, while a missed region is not correctly segmented or
O/S or U/S; Noise is an MS region with no ground truth equivalent.
Result
 wechat
wechat alipay
alipay

